JSR'automatisation du processus de manutention robotisée avec YASKAWA Le robot de manutention est utilisé dans la manutention et le déballage des sacs de particules en plastique, c'est unopération de manutention précise, fiable et durable, contribuant à la valeur pour promouvoir l'automatisation de la production.
Que ce soit dans les secteurs de la machinerie, de l'agriculture, de l'habillement, de la construction ou de la vie quotidienne, on observe l'importance des particules de plastique recyclé. Après leur emballage, ces particules doivent être manipulées manuellement, une tâche intermittente, coûteuse et exigeante en main-d'œuvre. Auparavant, le temps de travail du client était de 8 heures et chaque sac pesait 25 kg. Le rendement manuel est de 2 sacs par minute, permettant le démontage de 960 sacs par jour. Le temps de travail après la manipulation et le démontage robotisés est de 24 heures, permettant un fonctionnement continu, avec un rendement de 3 sacs par minute et une capacité de 4 320 sacs par jour.
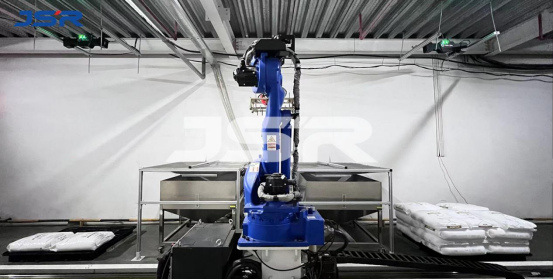
Les solutions mises en œuvre par Jieshfr pour les clients : robot de manutention Yaskawa GP180, rail au sol de 7,5 m de long, bac à matériaux, support à matériaux, charge maximale GP180 180 kg, envergure maximale du bras 2702 mm. La course effective sur orbite terrestre de 7,5 m est de 6 m, la vitesse de déplacement est de 0,7 m/s. Système de masquage d'identification visuelle 3D. Système de masquage d'identification visuelle 3D, caméra avec fonction d'apprentissage, grâce à l'acquisition précoce des données matérielles et à la modélisation ultérieure des matériaux, de sorte que le taux de réussite de la reconnaissance par caméra est de 99,9 %.
La production automatique améliore considérablement l'efficacité du travail, la capacité de production stable, la livraison précise, la sécurité élevée, l'utilisation raisonnable de la zone existante, améliore l'image de l'entreprise et la propreté de l'atelier, pour réaliser une production sans pilote.
Date de publication : 26 septembre 2022
